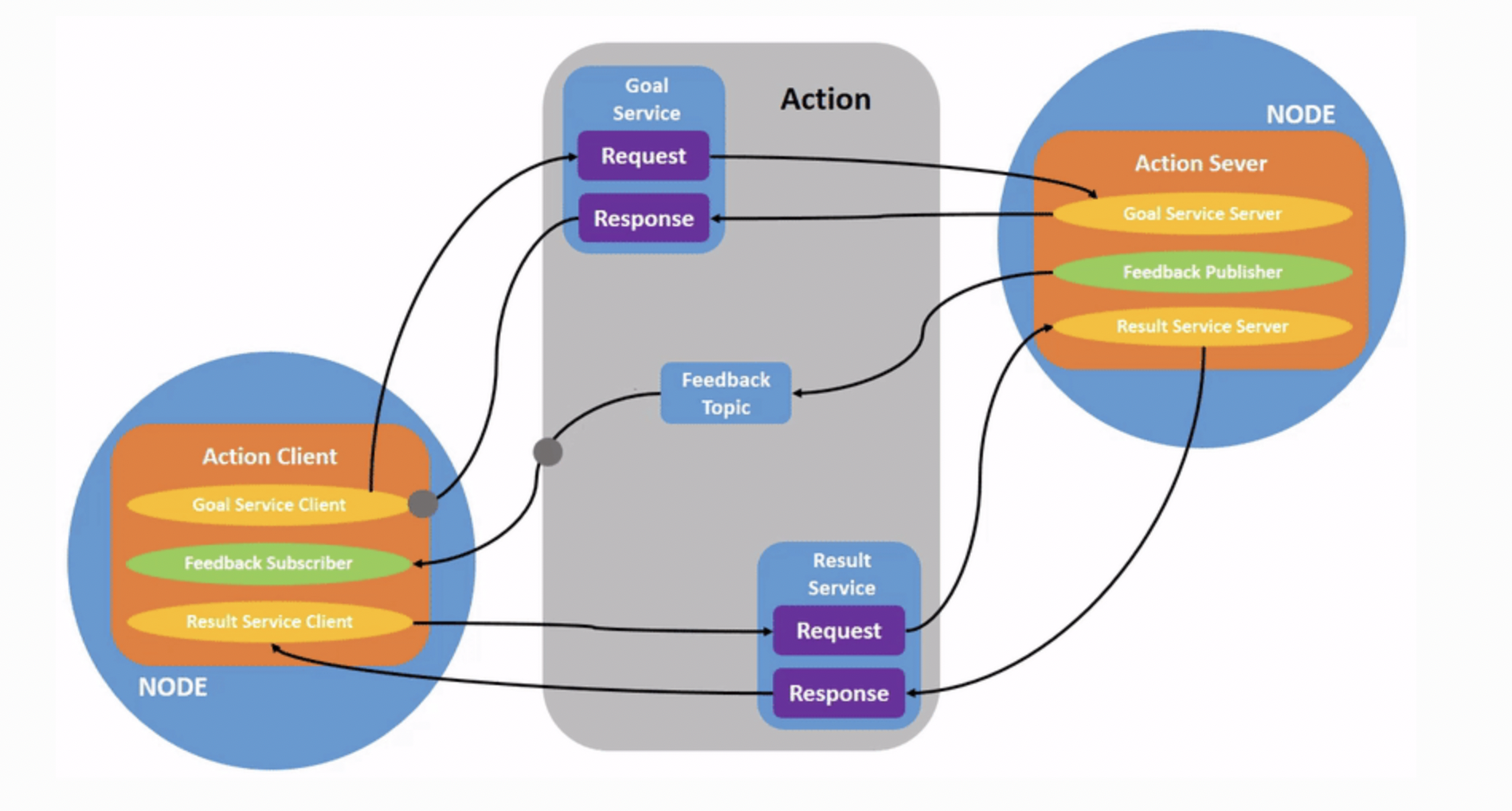
Actions are communication types in ROS 2 that are intended for long running tasks, contain 3 parts: a goal, feedback, and a result
Actions are build on ROS Topics and ROS Services. Actions functionality is similar to services, except actions can be canceled. They also provide steady feedback, as opposed to services which return a single response
Architecture: