What’s with these weird names lol
uXRCE-DDS is the middleware that allows PX4 uORB messages to be published and subscribed on a companion computer as they were ROS 2 topics.
This provides fast and reliable integration between PX4 and ROS 2
Architecture Diagram:
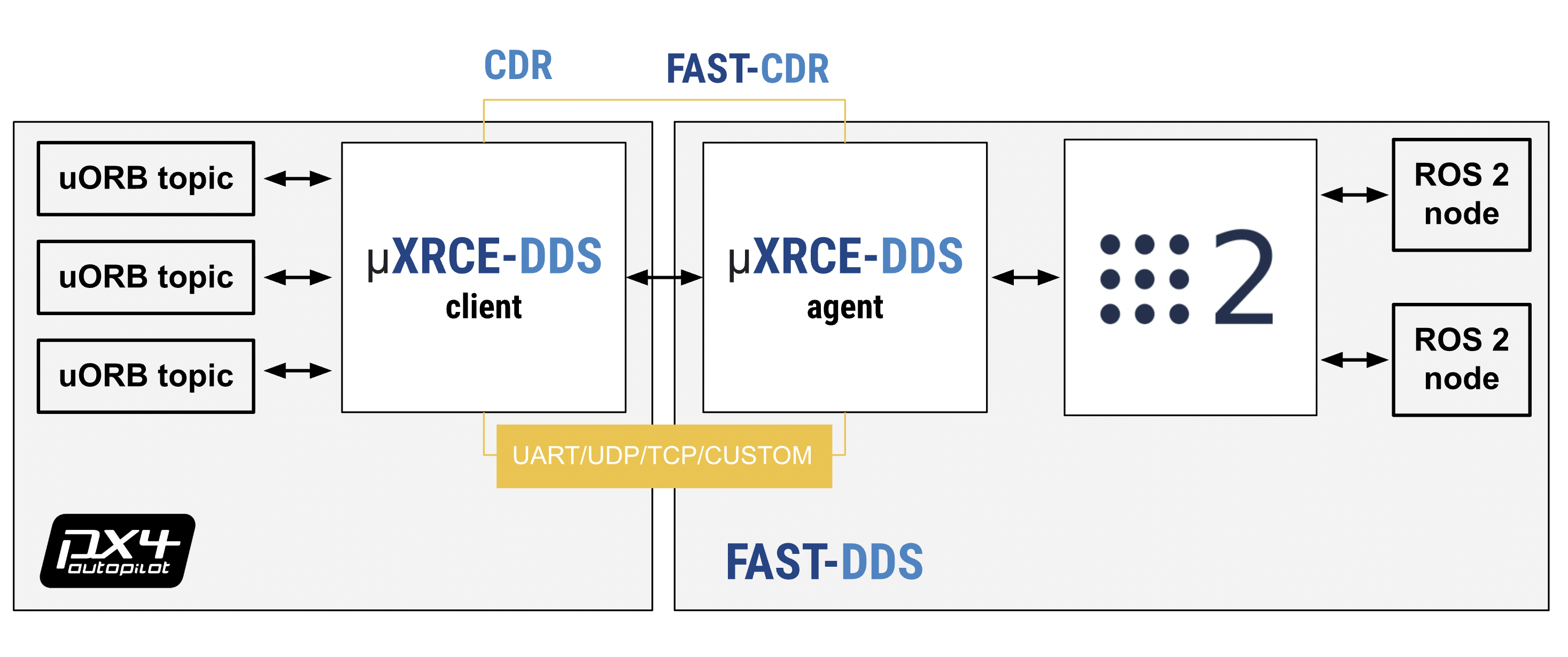
The agent has no dependency on client side code and can be built or installed independent of PX4 or ROS
Code that wants to subscribe / publish to PX4 has a dependency on client-side code, it requires uORB message definitions that match those used to create the PX4 uXRCE-DDS client so it can interpret messages